R-CNN、Fast R-CNN 和 Faster R-CNN
R-CNN
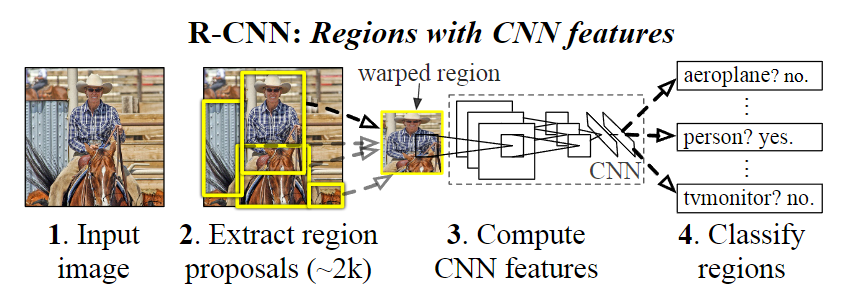
R-CNN 是 2014 年由 Ross Girshick 等人提出的第一个基于深度学习的目标检测算法。R-CNN 的整体框架如下:
- 使用 Selective Search 算法从图像中提取约 2000 个候选区域(Region Proposal)。
- 将候选区域输入到 ImageNet 预训练的 CNN 中提取特征。
- 使用支持向量机(SVM)对候选区域进行分类。
- 使用边界框回归(Bounding Box Regression)对候选区域进行边界框的微调。
R-CNN 的优点是:
- 首次将深度学习应用于目标检测,取得了突破性的进展。
- 可以检测多种目标,如人、车、动物等。
R-CNN 的缺点是:
- 候选区域的生成需要额外的计算。
- SVM 分类和边界框回归需要额外的存储空间。
Fast R-CNN
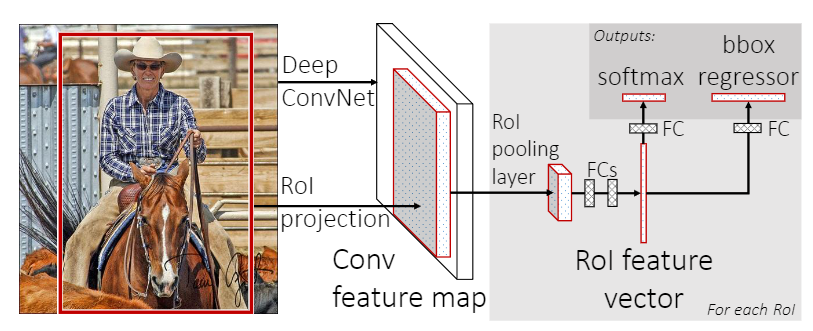
Fast R-CNN 是 2015 年由 Ross Girshick 等人提出的改进版,主要解决了 R-CNN 中候选区域生成和特征提取冗余的问题。Fast R-CNN 的整体框架如下:
- 使用 Selective Search 算法从图像中提取约 2000 个候选区域。
- 将整张图像输入到 CNN 中提取特征。
- 使用 RoI pooling 层将候选区域映射到 CNN 的最后一层特征图上。
- 使用全连接层对候选区域进行分类和边界框回归。
Fast R-CNN 的优点是:
- 解决了候选区域生成和特征提取冗余的问题,提高了效率。
- 可以与其他目标检测算法结合使用,提高性能。
Faster R-CNN
Faster R-CNN 是 2015 年由 Ross Girshick 等人提出的进一步改进版,主要解决了 Fast R-CNN 中候选区域生成的准确性问题。Faster R-CNN 的整体框架如下:
- 使用 Region Proposal Network(RPN)生成候选区域。
- 将整张图像输入到 CNN 中提取特征。
- 使用 RoI pooling 层将候选区域映射到 CNN 的最后一层特征图上。
- 使用全连接层对候选区域进行分类和边界框回归。
Faster R-CNN 的优点是:
- 使用 RPN 生成候选区域,提高了准确性。
- 可以与其他目标检测算法结合使用,提高性能。
R-CNN、Fast R-CNN 和 Faster R-CNN 的区别
R-CNN、Fast R-CNN 和 Faster R-CNN 的主要区别如下表所示:
| 算法 | 候选区域生成 | 特征提取 | 分类 | 边界框回归 |
|---|---|---|---|---|
| R-CNN | Selective Search | ImageNet 预训练的 CNN | SVM | 边界框回归 |
| Fast R-CNN | Selective Search | ImageNet 预训练的 CNN | RoI pooling 层 | 全连接层 |
| Faster R-CNN | RPN | ImageNet 预训练的 CNN | RoI pooling 层 | 全连接层 |
结论
R-CNN、Fast R-CNN 和 Faster R-CNN 是目标检测领域的里程碑,它们在提高目标检测的准确性和效率方面做出了重要贡献。Faster R-CNN 是目前最常用的目标检测算法之一,它已经被广泛应用于各种视觉任务,如图像分类、物体检测、人脸识别等。
References
- Rich feature hierarchies for accurate object detection and semantic segmentation
- Fast R-CNN
- Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
-------------本文结束感谢您的阅读-------------
本文作者:
Corner
本文链接: http://corner430.github.io/2023/10/28/R-CNN%E3%80%81Fast-R-CNN%E5%92%8CFaster-R-CNN/
版权声明: 本作品采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 进行许可。转载请注明出处!

本文链接: http://corner430.github.io/2023/10/28/R-CNN%E3%80%81Fast-R-CNN%E5%92%8CFaster-R-CNN/
版权声明: 本作品采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 进行许可。转载请注明出处!