目录
- Attention Is All You Need : Transformer
- End-to-End Object Detection with Transformers: DETR
- AN IMAGE IS WORTH 16X16 WORDS: TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE: Vision Transformer
- Incremental-DETR: Incremental Few-Shot Object Detection via Self-Supervised Learning
- Lightweight Transformer for Multi-Modal Object Detection (Student Abstract)
- Self-supervised Label Augmentation via Input Transformations
- Learn More for Food Recognition via Progressive Self-Distillation
- Solving Math Word Problems concerning Systems of Equations with GPT-3
- Curriculum Temperature for Knowledge Distillation
- SHARPNESS-AWARE MINIMIZATION FOR EFFICIENTLYIMPROVING GENERALIZATION
- Adaptive Hierarchy-Branch Fusion for Online Knowledge Distillation
- Peeling the Onion: Hierarchical Reduction of Data Redundancy for Efficient Vision Transformer Training
- Class Incremental Learning for Task-Oriented Dialogue System with Contrastive Distillation on Internal Representations (Student Abstract)
- Improving Training and Inference of Face Recognition Models via Random Temperature Scaling
- De-biased Teacher: Rethinking IoU Matching for Semi-supervised Object Detection
- Grouped Knowledge Distillation for Deep Face Recognition
泛读文章
本文角度清奇,利用知识蒸馏使得模型变弱,有意忘记某些知识。比如某些公司的授权到期,需要忘记相关知识,两种方法,其一是重新训练,其二就是本文(知识蒸馏)。
- 正如题目所言,本文采用了一种随机知识蒸馏的方法,具体来说,每次迭代中从很多老师中挑选一个老师,然后进行知识蒸馏。(老师们具有不同的容量层级)在能力基本没有损失的情况下,模型的大小减少了 40%。
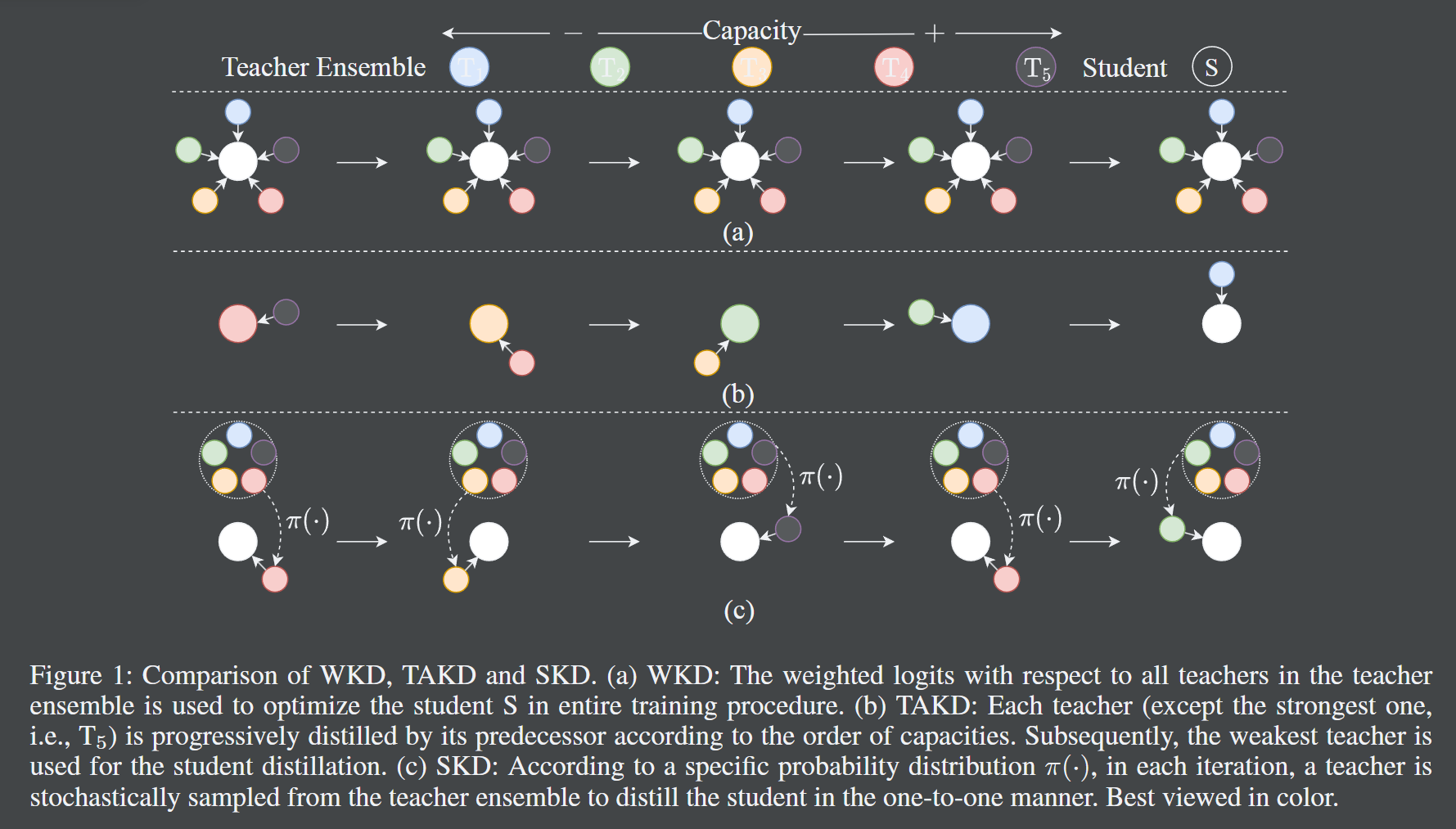
| 本文提到了很多知识蒸馏的方法,可以参考。 |
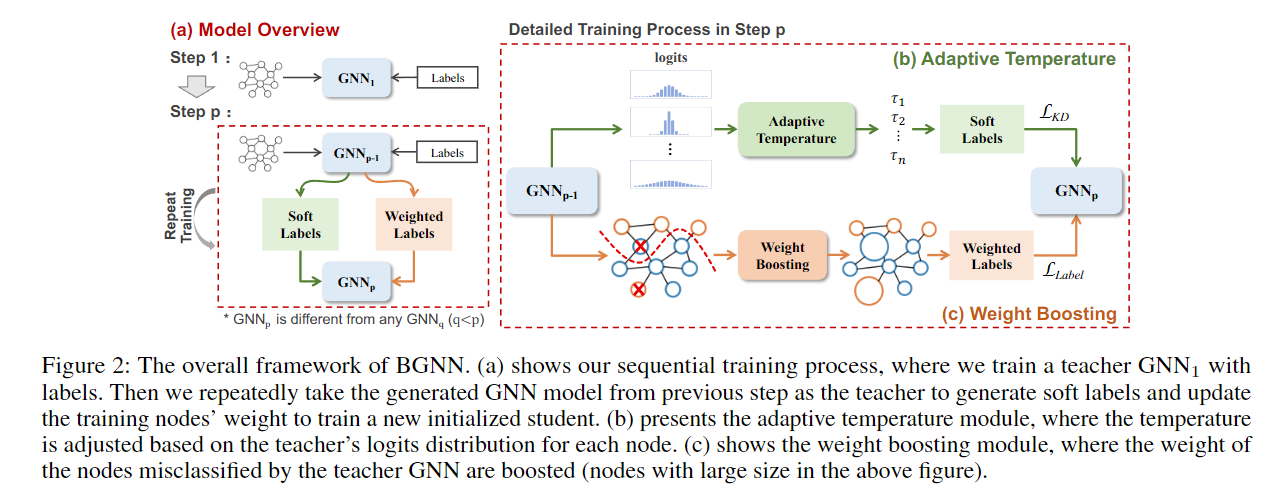
- 这篇论文是关于如何利用多个图神经网络(GNNs)的互补知识来提高一个学生GNN的性能。它提出了一个自适应的知识蒸馏(KD)框架,叫做BGNN,它可以顺序地将不同GNNs的知识转移到学生GNN中。它还引入了一个自适应温度模块和一个权重提升模块,来指导学生GNN有效地学习。这篇论文在节点分类和图分类任务上都取得了很好的效果,相比于原始的GNNs,分别提升了3.05%和6.35%。
作者认为,对于同一个GNN,采用不同的聚合方式,会学到不同的知识,现在希望互补的掌握这些知识,怎么办呢?采用知识蒸馏最好。
但这会有如下难点:
- 传统的 KD teacher 要比 student 大,而本次任务中,两者相同容量
- GNN 一般都比较浅
作者的创新在于,提出了这种构想,并引入了 自适应温度模块和权重提升模块
- 自适应温度模块,根据 teacher model 对于节点的 logits 分布,进行设计。具体依据是针对不同节点的梯度值。
- 权重提升模块,哪个节点对应的分类错误率高,就给哪个节点的权重提升。
正文
1. Attention Is All You Need : Transformer
先修知识
BLUE(Bilingual Evaluation Understudy)
机器翻译中的BLEU是一种用于评估机器翻译质量的指标,它通过计算机器翻译的句子和人工翻译的参考句子之间的n-gram匹配程度,来衡量机器翻译的精确度。n-gram是指连续的n个词,例如,unigram是一个词,bigram是两个词,trigram是三个词,依此类推。BLEU的取值范围是0到1,越接近1表示机器翻译越好,越接近0表示机器翻译越差。BLEU的计算公式如下:
$$
BLEU = BP \cdot exp(\sum_{n=1}^N w_n \log p_n)
$$
其中,BP是简短惩罚因子,用于惩罚过短的机器翻译,防止机器翻译只输出少数几个词就获得高分。BP的计算公式如下:
$$
BP = \begin{cases}
1, & \text{if } c > r \
e^{(1-r/c)}, & \text{if } c \leq r
\end{cases}
$$
其中,c是机器翻译的总长度,r是参考翻译的最佳匹配长度,即与机器翻译最接近的参考翻译的长度。
$p_n$是基于n-gram的改进精确度,用于计算机器翻译中的n-gram和参考翻译中的n-gram的匹配比例。$p_n$的计算公式如下:
$$ p_n = \frac{\sum_{\text{n-gram} \in C} \text{Count}_{\text{clip} }(\text{n-gram})}{\sum_{\text{n-gram} \in C} \text{Count}(\text{n-gram})} $$其中,C是机器翻译的句子,$\text{Count}(\text{n-gram})$是机器翻译中n-gram的出现次数,$\text{Count}_{\text{clip} }(\text{n-gram})$是机器翻译中n-gram的截断计数,即机器翻译中n-gram的出现次数与参考翻译中n-gram的最大出现次数的较小值。
$w_n$是n-gram的权重,一般取均匀权重,即$w_n = 1/N$,其中N是n-gram的最大阶数,通常取4。
简介
本文发表于 2017 年,提出了一种新的网络结构 Transformer,该结构完全基于 attention 机制,不再使用 CNN 和 RNN,因此可以并行计算,加快训练速度。Transformer 在机器翻译任务上取得了很好的效果,其后被广泛应用于其他任务中。
数据集:
WMT 2014 English-German: 包含了约 4.5 万对英德语句子,其中训练集包含 3.7 万对句子,开发集包含 0.5 万对句子,测试集包含 0.3 万对句子。句子来源于新闻、学术论文、书籍和网站等。
WMT 2014 English-French: 包含了约 35 万对英法语句子,其中训练集包含 29 万对句子,开发集包含 3 万对句子,测试集包含 3 万对句子。句子来源于新闻、学术论文、书籍和网站等。
摘要
- 前人做的 sequence transduction 都是基于 RNN 或者 CNN
- 都用到了 encoder-decoder 结构
- 本文仍然基于 encoder-decoder 结构,但是不再使用 RNN 和 CNN,而是使用 attention 机制,这可以更好的并行。
- 所用指标为 BLUE,效果最好。
引言
- RNN 需要顺序的计算,无法并行。
- 已经有人使用了 attention 机制,但大都是和 RNN 或者 CNN 结合使用的。
- 在 8 个 P100 上训练了 12 个小时。
背景
- 前人的方法还是没有解决长距离知识学习的问题,距离越长,所需要的计算越多。
- 在 Transformer 中,我们会通过 embedding 来固定维度,这会带来不好的影响,但所幸有 multi-head attention 来抵消。
- self-attention
- 前人已证,基于 recurrent attention mechanism 的效果更好,但还没有人仅用 attention 机制来做。
模型架构
- 沿用 Encoder-Decoder 结构,注意这里的 Decoder 是自回归的。(就是当前输入依赖于前面的输出)
- The Transformer - model architecture.
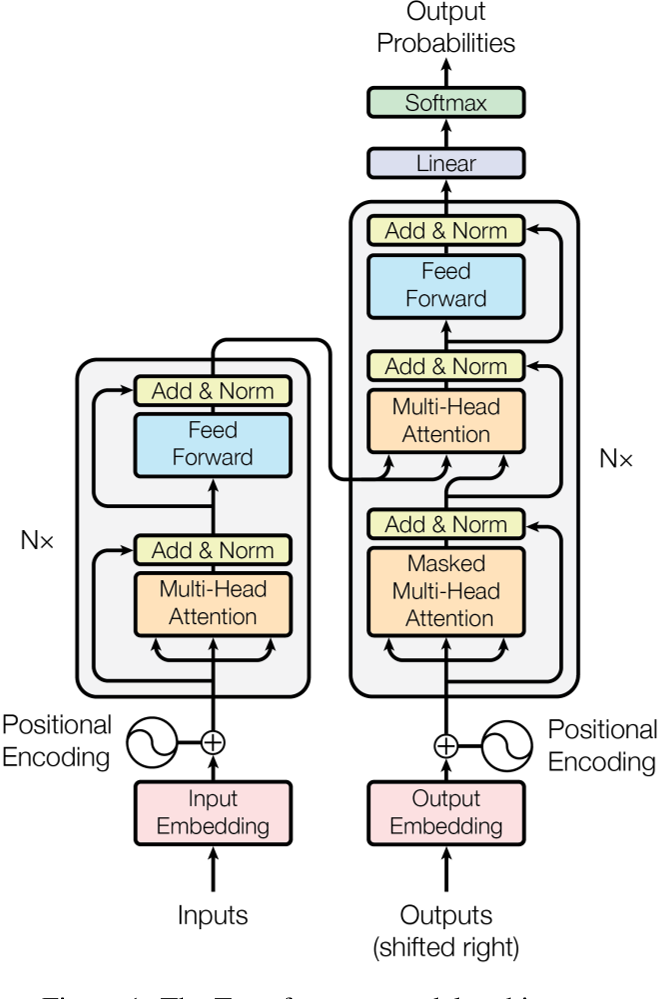
Encoder
- N = 6
- 两层 sub-layer,分别是 multi-head self-attention 和 position-wise fully connected feed-forward network
- 每层都有 residual connection,然后接 layer normalization
- 为满足 residual connection,embedding 和 encoder 的输出维度都是 d_model = 512
Decoder
- N = 6
- 三层 sub-layer,分别是 masked multi-head self-attention,multi-head self-attention 和 position-wise fully connected feed-forward network
- 每层都有 residual connection,然后接 layer normalization
- 对于编码器的输出执行多头注意力,K(键)和V(值)来自编码器的输出,而Q(查询)来自解码器的输出。这确保了解码器中的每个位置都可以访问编码器输出中的所有位置。
- masked multi-head self-attention 用于防止解码器中的位置访问后续位置。这是通过将查询掩码为负无穷来实现的。
Attention
- Scaled Dot-Product Attention
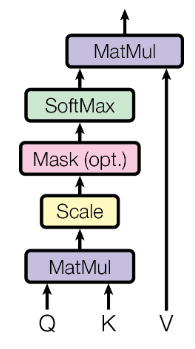
其中 queries 和 keys 的维度是 $d_k$,values 的维度是 $d_v$。
事实上, 这里是可以并行的,参见原文3.2.1
作者在这里指出,点积 要比 加性 效率高,具体谁更好,参见原文。
除以 $\sqrt{d_k}$ 是为了消除方差的影响,参见原文第四页页脚
- Multi-Head Attention
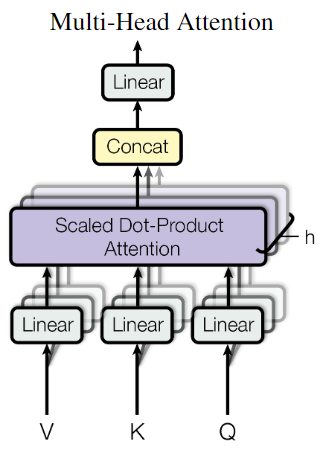
作者认为,直接将 queries,keys 和 values 映射到 $d_{model}$ 维度的空间中,可能会导致信息损失,因此,作者将 queries,keys 和 values 分别映射到 $d_k$,$d_k$ 和 $d_v$ 维度的空间中,然后进行 Scaled Dot-Product Attention,最后将多个结果拼接起来,再次映射到 $d_{model}$ 维度的空间中。
具体而言,文中设定 h = 8,即将 queries,keys 和 values 分别映射到 $d_k$ = $d_v$ = $d_{model}$/h = 64 维度的空间中,然后进行 Scaled Dot-Product Attention,最后将多个结果拼接起来,再次映射到 $d_{model}$ 维度的空间中。参见原文3.2.2
Applications of Attention in our Model
- quiries 来自前一个 decoder layer,keys 和 values 来自 encoder 的输出
- encoder 包含 self-attention
- 通过 mask 来防止 decoder 中的位置访问后续位置,具体而言,就是将 values 的后续位置 mask 为负无穷,这样过 softmax 之后,就会变成 0,即不会影响结果。
Position-wise Feed-Forward Networks
$$\mathcal{FFN} (x) = \mathbb{max} (0, x W_1 + b_1)W_2 + b_2$$
其中输入和输出的维度都是 $d_{model}$ = 512,而中间层的维度是 $d_{ff}$ = 2048。
- embedding
作者将 input embedding 和 output embedding 共享参数,都是通过一个 线性层再加上一个softmax 来实现的。
在 embedding 的时候,所有的权重乘以 $\sqrt{d_{model} }$,这样可以使得 embedding 的结果的方差为 1,具体原因参考这篇帖子。
- Positional Encoding
- attention 机制没有考虑到序列中词的位置信息。因此,作者在 embedding 后加入了位置编码,用于表示词的位置信息。
- 维度为 $d_{model}$ = 512,位置编码的维度也是 512。便于求和
其中,pos 是词在句子中的位置,i 是位置编码的维度。
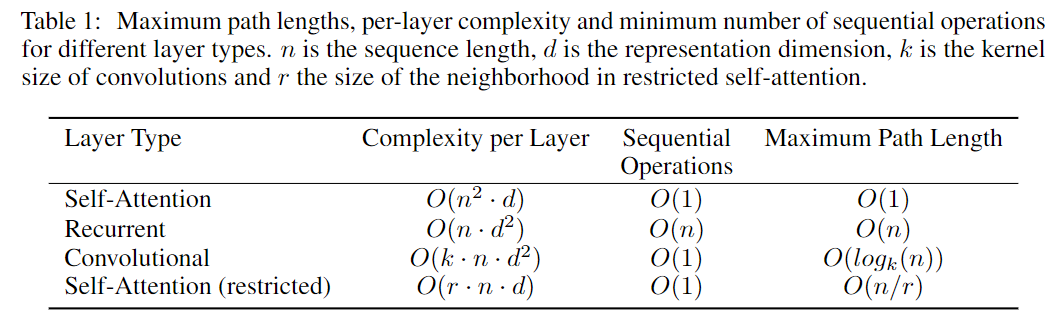
Why Self-Attention?
- 可并行
- 距离远的词也可以相互影响
- 作者还提出了 局部注意力
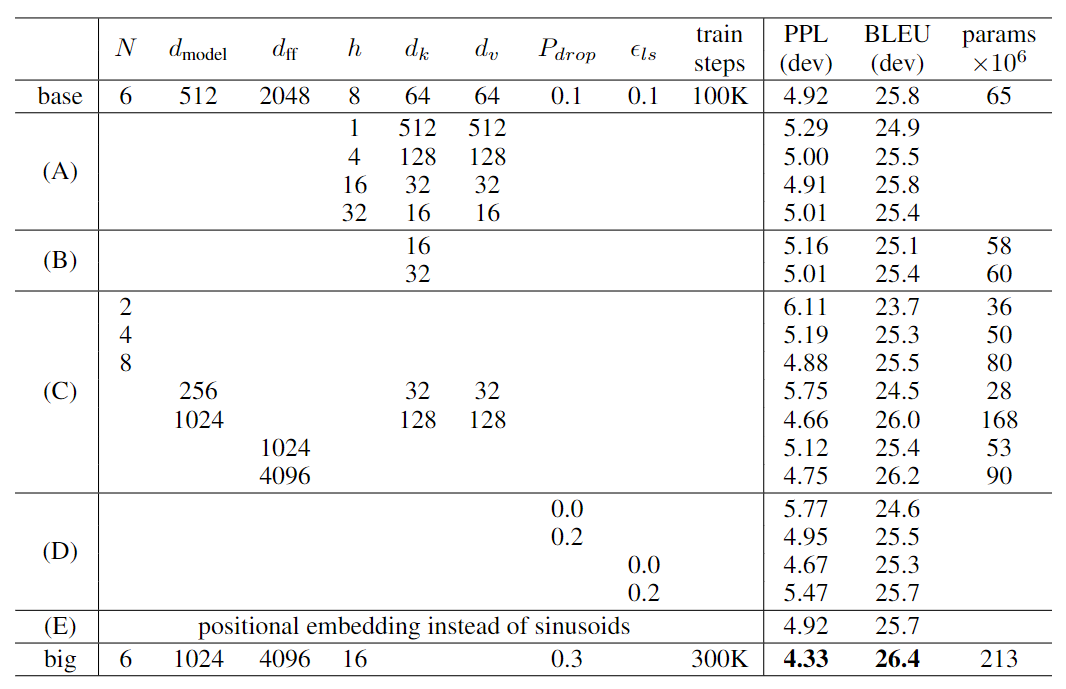
Training
Results
其中大模型用 8 个 P100 GPU 训练了 3.5 天
Conclusion
- 本文提出了一种新的网络结构 Transformer,该结构完全基于 attention 机制,不再使用 CNN 和 RNN,因此可以并行计算,加快训练速度。
- Transformer 在机器翻译任务上取得了很好的效果,其后被广泛应用于其他任务中。
- 可以考虑 局部注意力
- 可以试试在 图像或音频 上应用 Transformer
2. End-to-End Object Detection with Transformers: DETR
先修知识
- Hungarian algorithm : 匈牙利算法,用于解决指派问题
摘要
- 将目标检测视为 set prediction 问题,使用 Transformer 来解决。去除了 NMS、anchor、poposals 等。直接输出目标的位置和类别,真正的实现了端到端。
- 性能对标 Faster R-CNN,但速度更快。
- 数据集:COCO
- code
引言
- 现在都不是端对端,都是先生成一些 proposals,然后再分类,最后再回归。这样的结果受限于中间的这些操作。
- 虽然用到了 Transformer,但是却是并行出结果,不需要自回归。
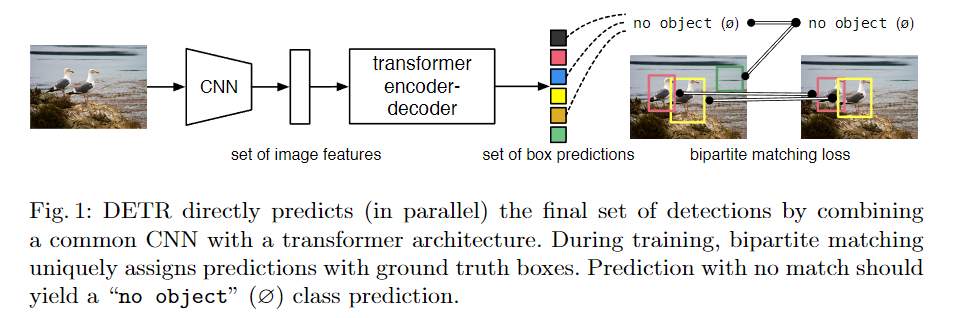
- 用到了 bipartite matching loss
- 在大物体上效果好,小物体上效果稍差
- 消融实验做的很好
- 很容易扩展到全景分割
相关工作
- 之前都是需要一些知识给模型,也就是先验知识,比如 anchor,NMS,proposals 等。
- 也有人通过 bipartite matching 来解决目标检测问题,但是是基于 RNN 的。
模型架构
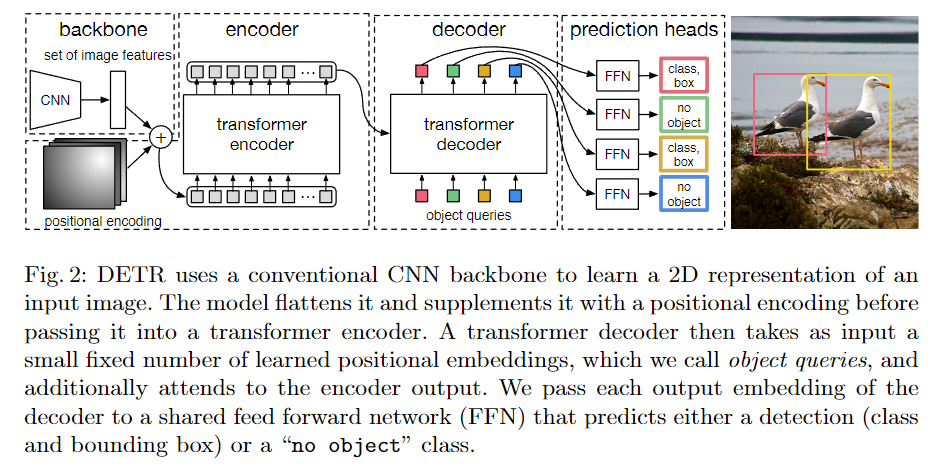
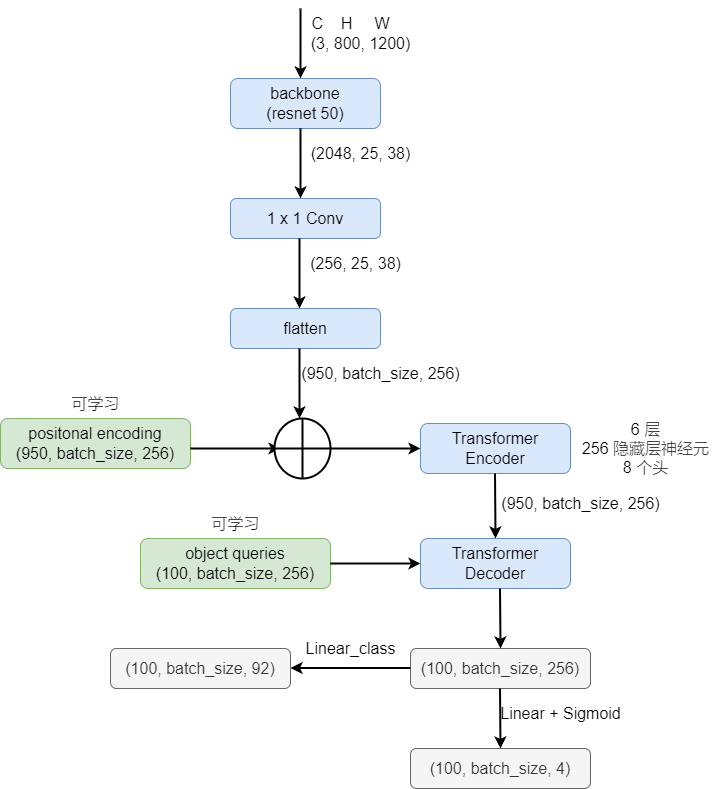
- object queries 是一个固定的向量,用于表示目标的个数,这里是 100 个(也就是 100 个框,根据数据集设定就好)。
- Matching cost 同时考虑了 class 和 box 的信息
- 仅对类别为 非空 的进行计算损失。
- 类别预测的损失,去除了 log,详见原文 3.1
- 边界框预测的损失,详见原文 3.1,使用了广义 IoU
loss 的计算分为如下几个部分:
首先通过 $\mathcal{L}_{match}$ 一对一的找到框,之后算损失:box loss + class loss
$$ \hat{\sigma} = \text{arg} \quad \text{min}_{\sigma \in \mathcal{\sigma}_N} \sum_{i=1}^N \mathcal{L}_{\text{match} }(y_i, \hat{y}_{\sigma(i)}) $$- $y_i = (c_i, b_i)$ 是 ground truth
- $c_i$ 是 class label,可以是 $\emptyset$
- $b_i$ 是 bounding box,(center x, center y, height, and width relative to the image size).
- $\hat{y}_i$ 是预测的结果,可以 padded with $\emptyset$ (no object) when N > the number of objects.
- $\hat{c_i}$ 是预测的类别
- $\hat{b_i}$ 是预测的 bounding box
- $\mathcal{\sigma(i)}$ is an index within a particular permutation of N elements.
$$ \mathcal{L}_{\text{Hungarian} }(y, \hat{y}) = \sum_{i=1}^N [- \log \hat{p}_{\hat \sigma(i)}(c_i) + \mathbb{1}_{\{c_i \neq \emptyset\} } \mathcal{L}_{\text{box} }(b_i, \hat{b}_{\hat \sigma(i)})] $$$L_1$ 损失较常用,但是对于小框和大框的损失处理有问题,因此作者加入了 $IoU$ 损失,详见原文
事实上,作者还加了超参系数做平衡。这里使用了对数,而上文没有,是因为二者考虑的问题不一样,一个是考虑数值相对平衡,一个是考虑梯度相对平衡。
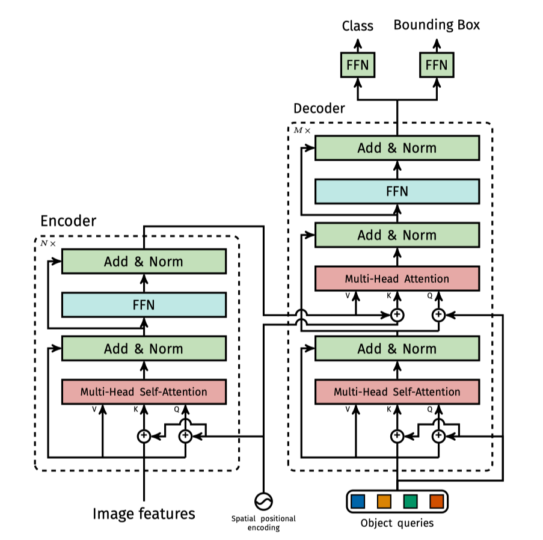
- positional encoding 也好,object queries 也好,都加入到了每一层 attention layer 的计算,
- 作者还加入了 Auxiliary decoding losses,也就是每一层的输出都会计算损失(但是所有的 FFN 共享参数),详见原文 3.2
实验
- 详细探究了每个组件的作用
- 全景分割的实验
结论
- 本文提出了一种新的目标检测方法 DETR,该方法使用 Transformer 来解决目标检测问题,去除了 NMS、anchor、poposals 等,直接输出目标的位置和类别,真正的实现了端到端。
附录代码
1 | import torch |
3. AN IMAGE IS WORTH 16X16 WORDS: TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE: Vision Transformer
作者是 Google Research 的人
将一个不修改的 transformer 应用于图像分类,是有一定困难的。因为 transformer 的输入是一个序列,而图像是一个二维的矩阵,我们可以将图像转换为序列,但是这样会导致序列过长,计算量过大。
因此,作者提出了一种新的 transformer,叫做 Vision Transformer(ViT),该 transformer 仍然是基于 attention 机制的,但是在输入的时候,作者将图像分为了一个个 patch,然后将每个 patch 作为一个 token,这样就可以将图像转换为序列,而且序列的长度不会太长。这样的 transformer 也可以用于目标检测和语义分割。
架构图如下:
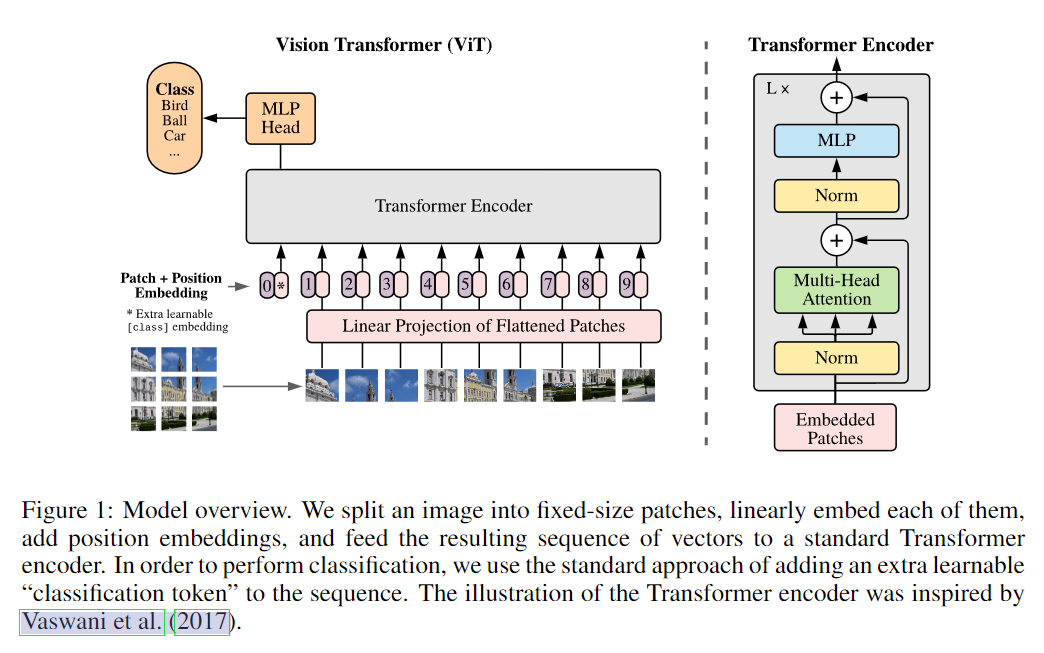
将图像分为了 $N$ 个 patch,每个 patch 的维度是 $P$,这样就可以将图像转换为一个序列,序列的长度是 $N$,维度是 $P$。需要单独再加一个 class token,用于表示图像的类别。
4. Incremental-DETR: Incremental Few-Shot Object Detection via Self-Supervised Learning
作者是新加坡国立大学和哈尔滨工业大学的学生
摘要
- Incremental 旨在学习新类别的目标检测,而不会影响到已有类别的目标检测。
- novel class 数据量少
- 通过在 DETR 上进行 fine-tune 和 self-supervised learning 来实现。
- 用到了 selective search algorithm
- 用到了 knowledge distillation
- code
引言
- 增量学习一直都是一个难题,很容易出现 catastrophic forgetting。
- 前人通过同时训练 base class 和 novel class 来解决,但是如果我们没有 base class 的数据,方法就会受限。
- 前人在 Faster R-CNN 做过类似的事情,第一阶段在 base class 上训练,第二阶段冻结类无关提取器和 RPN,只对预测头进行 fine-tune。作者深受启发。
- 作者解冻不同的DETR层进行微调,并根据经验确定投影层和分类头是特定于类的,DETR的CNN主干、变压器和回归头与类无关
- 假定在进行 incremental 的时候,base class 的数据是不可用的。
- 第一阶段:base model 预训练,之后进行 self-supervised fine-tune。第二阶段:在 novel class 上进行 incremental fine-tune。
- 第一阶段用到了 slecetive search algorithm
- 提出了 classification distillation loss 和 masked feature distillation loss
- dataset:COCO、PASCAL VOC
相关工作
- Object Detection
- Few-Shot Object Detection
- Incrementa Few-Shot Object Detection
问题定义
- $D_{novel}$ 用的时候 $D_{base}$ 不可用
- 新类和旧类没有重叠
- 新类仅有少量样本
方法
Base Model Training
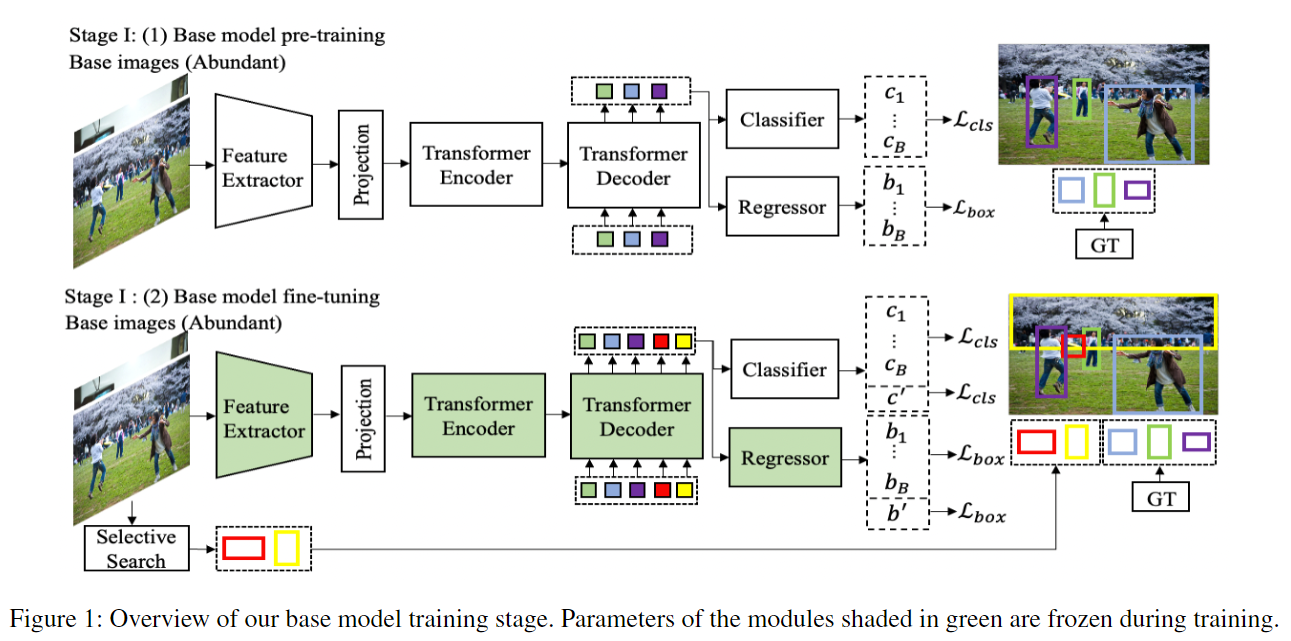
- 在 stage 1 的第一部分,采用正常的 DETR 训练策略在 $D_{base}$ 上进行训练。
- 在 stage 1 的第二部分,进来一张图片,通过 selective search algorithm 生成一些 proposals,之后选择 top O 个 proposals,要求这些 proposals 与 base class 的 ground truth bounding box 不重叠。之后将这些 proposals 作为 pseudo ground truth,采用 DETR 的方式进行训练。也就是图中的 $b^
$,对应的类别是 $c^$。
- 找框:
- Hungarian loss:
- 在 stage 1 中的第二部分,损失为:
Incremental Few-Shot Fine-Tuning
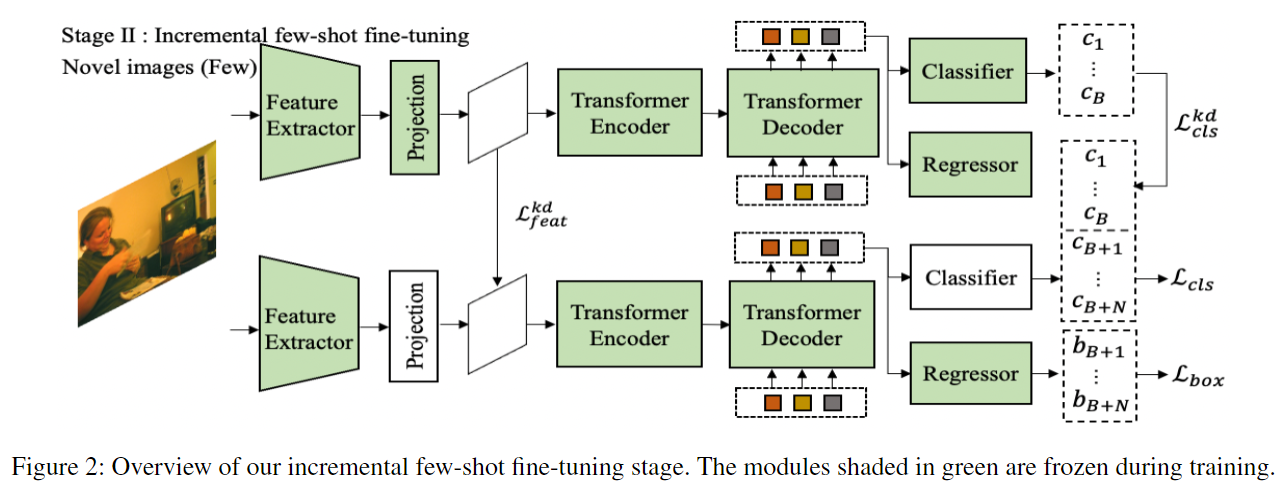
- 仅白色部分进行 fine-tune
- 直接 fine-tune,会导致 catastrophic forgetting,因此作者提出了 knowledge distillation。直接 knowledge distillation 会和 novel class 的学习产生冲突,所以这里引入了 $\mathcal{mask}^{novel}$,(如果是 novel class ground truth boxes,则为 1,否则为 0)。具体而言:
直观理解,对于每一个像素点,对于它的所有通道,去看它是否是 novel class bounding box 的一部分,如果是,则不需要进行 knowledge distillation,否则,则需要进行 knowledge distillation。
同样,对于分类器头,直接做 knowledge distillation 也不合适,为解决这个问题,如下:
$$ \mathcal{L}^{kd}_{cls} = \mathcal{L}_{kl\_div}(\log(q^{novel}), q^{base}) $$进来一张 novel image,通过 base model 进行预测,如果 class probability 大于 0.5,且 bounding box 与 novel class ground truth boxes 不重叠,则认为需要蒸馏,算 KL 散度。
- stage 2 的损失为:
实验
结论
- 通过蒸馏学习,做到了在学习新知识的同时不遗忘旧知识。
- 提前通过 self-supervised 生成一些 新类标签,进行fine-tune,使得模型更容易接受新知识。
- 断定模型中的部分可以分为 class-specific 和 class-agnostic 两部分。
5. Lightweight Transformer for Multi-Modal Object Detection (Student Abstract)
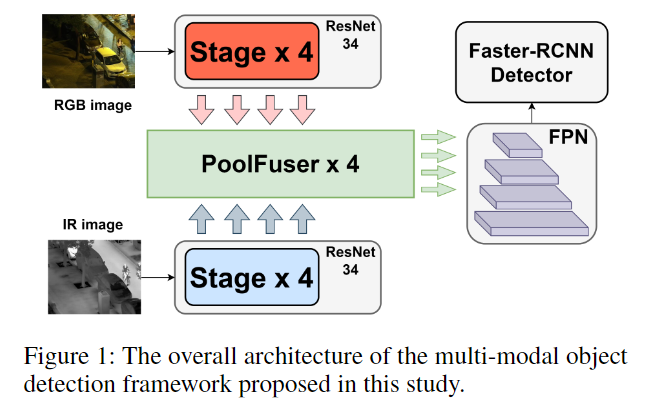
模型训练时,可以从多个角度进行训练,角度越多越准确,但却更慢。
比如自动驾驶,仅有一个传感器肯定没有多个传感器的结果准确,但是多个传感器的结果又太慢。
那么能不能又快又准呢?那就要从模态融合入手。作者提出了一种新的融合操作符,叫做 Poolformer-based fusion operator。
本质上来讲,本文更换了权重分配的方式,用 pooling 来进行替代,这样可以减少参数量,提高速度,但效果却不差。文章没有提供代码,但是作者回复邮件推荐了一份代码
6. Self-supervised Label Augmentation via Input Transformations
一言以蔽之,通过数据增强的方式来增强原始标签,不仅仅对于无监督、半监督学习有效,对于全监督学习也能带来效果的提升。将共享底层特征改成了 unified task
共享底层特征:先前的工作通常为原始任务和自监督任务维护两个独立的分类器(但共享公共特征表示),并同时优化它们的目标。也就是,不论你图像怎么变(增强),特征表示不能变。
有效地利用基于 transformation 的自我监督进行全监督的分类任务。对于 few-shot and imbalanced classification scenarios 也有效果
Difference with previous approaches:
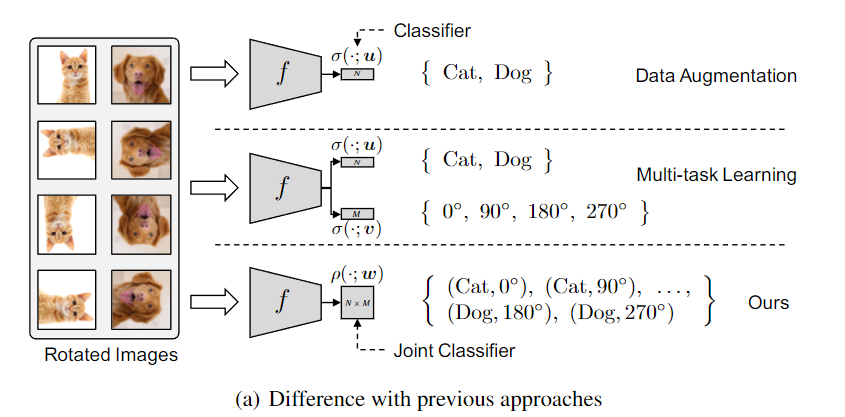
- 单纯的 Data Augmentation,只是对输入进行了变换,但却强行使得标签不变的一种方案,这种方案有一定弊端,比如:6 和 9,详见原文
- Multi-task Learning 同时学习两个任务,同时优化它们。但是,当数据集是全标签时,这种方法通常不会带来效果的提升。
- 本文所提出的SLA(Self-supervised Label Augmentation)方法直接学习联合概率分布。效果最好,也最通用。
此处损失详见原文。
对比效果如下:
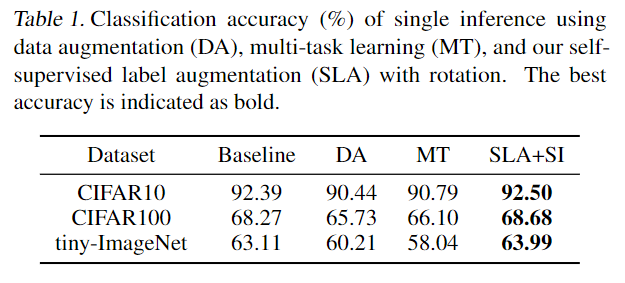
SLA 仅增加了标签的数量,对于模型的参数基本上没有影响。
SLA 可以弱化为 Data Augmentation,也可以弱化为 Multi-task Learning。但是 Multi-task Learning 约束太强(强制 label 不变),难以优化。
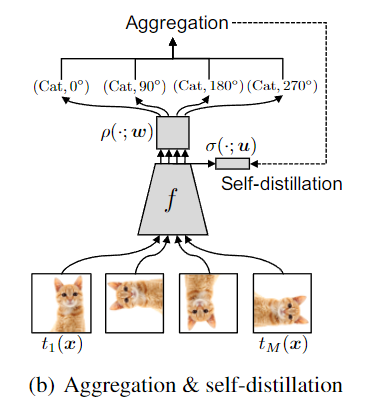
由于预测的结果变为了以前的 M 倍,所以先做 Aggregation,也就是把对应的 M 个条件概率加起来,然后再进行 softmax。之后和原来的标签进行交叉熵计算蒸馏损失。
$$ \mathcal{L}_{SLA}(x,y;\theta,\omega,\mu) = \mathcal{L}_{SLA}(x,y; \theta, \omega) + \mathcal{D}_{KL}(P_{aggregated}(·|x)|| \sigma(z;\mu)) + \beta \mathcal{L}_{CE}(\sigma(z;\mu), y) $$7. Learn More for Food Recognition via Progressive Self-Distillation
- 面临的问题:
食品识别一直是一个比较困难的任务,因为这是一个比较细粒度的任务。例如对于鸟的识别,找到鸟头、爪子就好了,但是食品可能是各种水果、蔬菜堆叠在一起构成沙拉,这比较困难。传统的方法是先用弱监督的方式做很多位置的定位,之后聚合并抽取特征,最后分类。但这样一来,性能就会被位置定位所限制。我们很难把每一部分区域都学好。
- 解决方案:
作者提出了 PSD(Progressive Self-Distillation),用于去挖掘图像中更有用的区域。teacher model 和 student model 共享相同的 embeding。最后 inference 阶段,仅保留 teacher model。仍然属于 self-supervised 的范畴。
embedding 可以用 CNN,也可以用 transformer(e.g.,Swin Transformer)。
- dataset:ETHZ Food-101、Vireo Food-172、ISIA Food-500
- code: 无
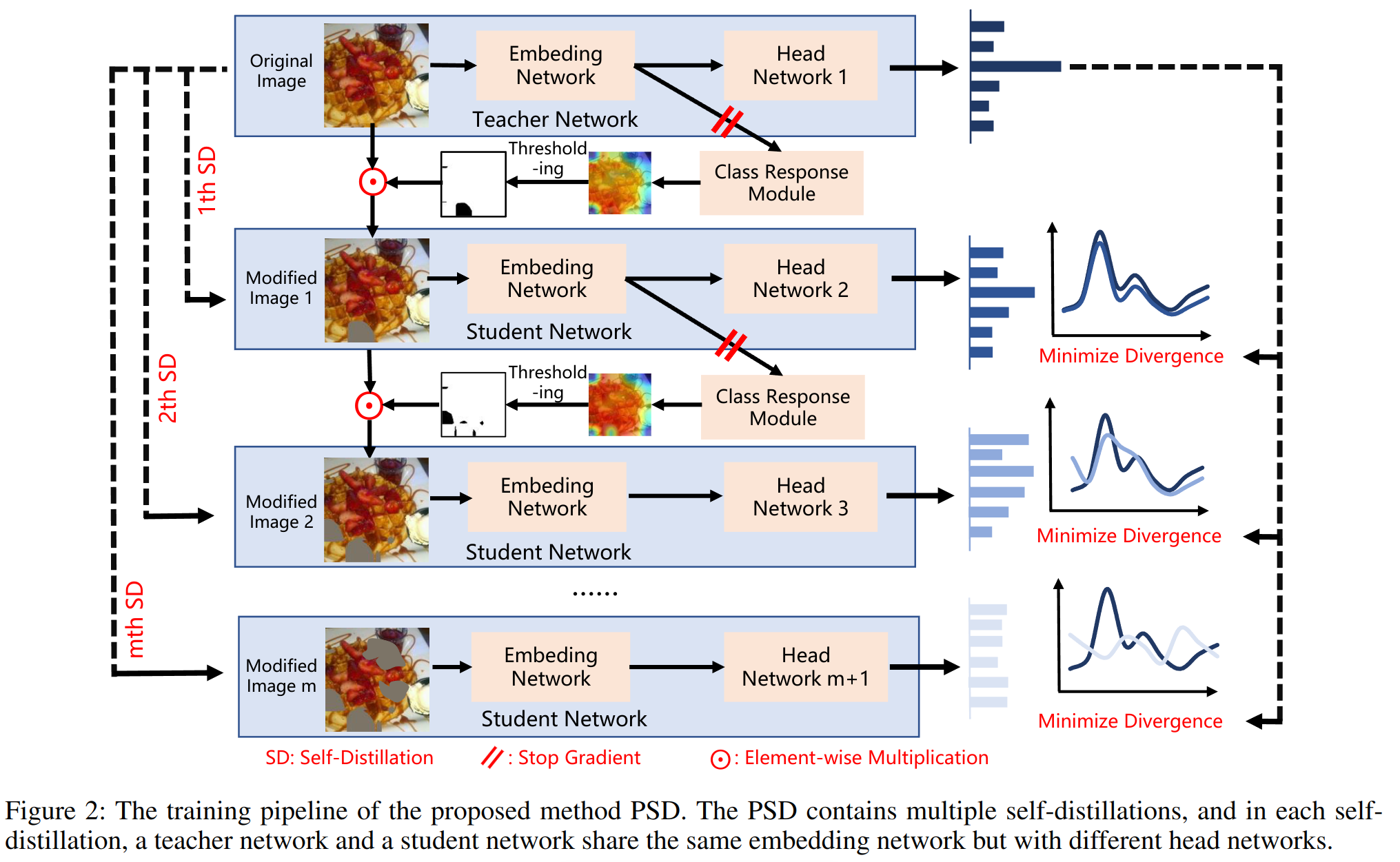
student model 和 teacher model 共享同一个 Embeding Network,但是有不同的分类器。输入原始图片给 teacher model,经过一个 ViT 得到一个 T x D 的 tokens,reshape 成 H x W x D 的 feature map,之后经过全局平均池化,得到一个 D 维的向量,之后经过一个全连接层,得到一个 C 维的向量,之后送入 Class Response Module。根据 Threshold,得到一个 mask,之后将 mask 与原始图片相乘,得到一个新的图片,送入 student model。如法炮制,进得到了很多的 student model。蒸馏阶段,使用 teacher model 的输出作为 ground truth,student model 的输出作为预测值,计算 KL 散度。
损失如下:
$$ \mathcal{L} = \mathcal{L}_{g}(x,y) + \sum_{i=1}^{m}(\omega_l \mathcal{L}_{l}(\hat{x}_{i-1}, y) + \omega_d \mathcal{L}_{d}(x, \hat{x}_{i})) $$ 其中 $\mathcal{L}_{g}(x,y)$ 是原始的分类损失,$\mathcal{L}_{l}$ 是 locating loss,$\mathcal{L}_{d}$ 是 distillation loss。 $$ \mathcal{L}_{g}(x,y) = \mathcal{L}_{CE}(h(f(x;\theta); \phi_t), y) $$ $$ L_{l}(x,y) = \mathcal{L}_{ce}(GAP(f(x;\theta); \Theta), y) $$ $$ \mathcal{L}_d(x, \hat{x}) = \mathcal{D}_{KL}(h(f(x;\theta); \phi_t), h(f(\hat{x};\theta); \phi_s)) $$所谓渐进,是依靠$\omega_l$ 和 $\omega_d$ 来控制的。
$$ \omega_d = \begin{cases} \alpha \cdot \exp(-5(1 - \frac{e}{\beta})^2), & e < \beta \\ \alpha, & e \geq \beta \end{cases} $$垃圾文章,没有代码,作者邮件不回。$L_l$也没有讲清楚。Class Response Module 出来之后怎么进行 Threshold?怎么得到 mask?这些都没有讲清楚。或许需要一些食物识别的先验知识。
8. Solving Math Word Problems concerning Systems of Equations with GPT-3
摘要
本文解决了一个专业领域的问题,就是数学方程式的提取和求解问题。作者将其归到了 NLP 的范畴,使用了 GPT-3 来解决这个问题。
问题分三步:
- 对问题进行 分类,是几元方程式。这个问题目前 GPT-3 能够达到 80%-100% 的准确率。
- 提取方程式,这个问题的精度随着给定模型的例子数量的增加而增加。one-shot 的精度为 31%,3-shot 的精度为 69%。之后再进一步进行 fine-tune,精度可以达到 80%。
- 生成新的问题,GPT-3 的精度在 33%-93%,具体取决于问题类型。
引言
本文聚焦的问题是 二元一次线性方程组,也就是两个变量,两个方程式。如上所述,解决问题如下:
Q1: How good is GPT-3 at classifying problems into different themes?
Q2: How good is GPT-3 at extracting a system of linear equations directly from problem descriptions?
Q3: How good is GPT-3 at creatively generating valid problems?
如下为 Q1. Table1: Instance problem from each category
| 类别 | 问题 |
|---|---|
| Sum and Difference (S&D) | The sum of half of a number, x, and another number, y, is -28. The difference of x and y is 7. Find x and y. |
| Item and Property (I&P) | Three apples and four bananas cost $4.85. Three apples and ten bananas cost $8.75. Find the cost of an apple. |
| Perimeter of Rectangle (PoR) | The length of a rectangle is 3 cm less than double the width, and the perimeter is 53 cm. Find its dimensions. |
| Motion (MO) | Joey and Natasha start from the same point and walk in opposite directions. Joey walks 4 km/h faster than Natasha. After 2 hours, they are 31 kilometers apart. How fast did each walk? |
| Mixture (MI) | Twelve gallons of a 31% acid mixture is obtained by mixing a 23% solution with a 48% solution. How much of each must be used? |
生成表达式的时候,前缀、中缀和后缀的进度不同。
已经有人通过 Transformer 来解决这个问题,但是作者说泛化性不好。详见文章的 Prior Applications of Transformers to MWP。还有人通过 BERT 来解决这个问题。
目前关注的问题是以下五个,作者仅考虑了其中的三个:
- identify the type of problem
- output step-by-step instructions
- extract the correct system of linear equations
- successfully solve the equations
- generate similar problems for users to practice.
Table 2: Extraction task example.
| Problem | How many gallons of a 20% antifreeze solution and a 10% antifreeze solution must be mixed to obtain 40 gallons of a 16% antifreeze solution? |
|---|---|
| Valid Response | 0.2x+0.1y=0.16*(x+y);x+y=40 |
| Invalid Response | 20x+10y=16*40 (only one equation is derived) |
| Invalid Response | 20x+10(40-x)=16(40) (failed to use required variable y) |
| Invalid Response | 2x+1y=40;0.2x+0.1y=0.16 (incorrect interpretation) |
Table 3: Problem generation.
| problem given in prompt | The larger of two numbers is 10 more than twice the smaller. If the smaller is subtracted from the larger, the result is 26. Find the numbers. |
|---|---|
| within-topic generation outcome | The larger of two numbers is 15 more than twice the smaller. If the smaller is subtracted from the larger, the result is 33. Find the numbers. |
| cross-topic generation outcome | The larger of two angles is 10 more than twice the smaller. If the smaller is subtracted from the larger, the result is 26. Find the angles. |
9. Curriculum Temperature for Knowledge Distillation
引言中指出:MKD (Liu et al. 2022) 比较重视 数据增强。
相关工作中指出:
- This training strategy has been widely applied in various domains, such as computer vision (Wu et al. 2018; Sinha, Garg, and Larochelle 2020) and natural language processing (Platanios et al. 2019; Tay et al. 2019).
- Curriculum Dropout (Morerio et al. 2017)
10. Sharpness-Aware Minimization for Efficiently Improving Generalization
cifar100 的结果:Percentage correct 96.08,最强结果。
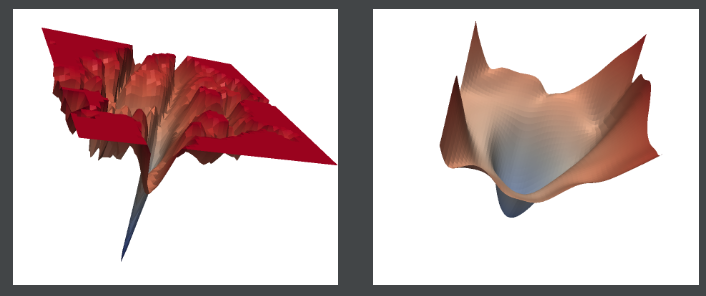
作者认为:现在模型的参数都特别多,单单靠 loss function 去做优化,不足以支撑起整个任务,这会导致太多不同的解。因此,作者提出了 SAM(Sharpness-Aware Minimization),通过优化 sharpness 来提高泛化性能,也就是优化曲率。
一言以蔽之:不仅仅要优化模型的 loss,还要优化 loss 最小值附近的 平滑度。可以将其视为一种学习算法,经测试,相当多的模型和任务,套用上这个算法,效果都会有所提升。
Theorem (stated informally) 1. For any $\rho$ > 0, with high probability over training set $S$ generated from distribution $\mathcal{D}$,
$$ \mathcal{D}(\omega) \leq \text{max}_{|| \epsilon ||_2 \leq \rho} \mathcal{L}_{S}(\omega + \epsilon) + \mathcal{h}(|| \omega ||_2^2 / \rho^2) $$where $h : R_+ → R_+$ is a strictly increasing function (under some technical conditions on $L_D (w)$).
事实上,上述公式的右侧可以写为:
$$ [\text{max}_{|| \epsilon ||_2 \leq \rho} \mathcal{L}_{S}(\omega + \epsilon) - \mathcal{L}_{S}(\omega)] + \mathcal{L}_{S}(\omega) + \mathcal{h}(|| \omega ||_2^2 / \rho^2) $$其中最后一项可以看成是一个正则项,可以用$\lambda || \omega ||_2^2$来代替。[]内的代表锐度,也就是 sharpness。中间那一项是 loss。
故而,SAM 的损失函数为:
$$ \text{min}_{\omega} \mathcal{L}_{S}^{SAM}(\omega) + \lambda || \omega ||_2^2 \quad \text{where} \quad \mathcal{L}_{S}^{SAM}(\omega) \stackrel{\triangle}{=} \text{max}_{|| \epsilon ||_p \leq \rho} \mathcal{L}_{S}(\omega + \epsilon) $$就是一个最大最小化问题,详细推导见原文。
Because SAM’s performance is amplified by not syncing the perturbations, data parallelism is highly recommended to leverage SAM’s full potential (see Section 4 for more details).就是数据并行,效果更好。
11. Adaptive Hierarchy-Branch Fusion for Online Knowledge Distillation
13. Class Incremental Learning for Task-Oriented Dialogue System with Contrastive Distillation on Internal Representations (Student Abstract)
本文通过对比、蒸馏等技术来实现增量学习,用于对话系统。
通过以下几种方式来保证增量学习的效果:
- 仅更新部分相关新任务的参数
- 对比学习:新任务中的数据作为 anchors,原数据作为负样本。上一阶段模型和新阶段模型对于新任务数据的输出作为正样本对。简而言之,学习新任务的时候,不仅仅学习新任务的知识,还要学习新任务和原任务的区别。
- 复杂的损失函数:包括对比损失、交叉熵损失、蒸馏损失等。相互协调,妄想达到最好的效果。
- 动量更新:保证模型的稳定性。
作者并未提供代码,也无邮件回复。一言以蔽之,将各种东西混合在一起构成一套灌水垃圾。
14. Improving Training and Inference of Face Recognition Models via Random Temperature Scaling
本文针对人脸识别,介绍了不确定的问题。
模型对于无效的输入,仍然会以高置信度做出预测,这是不合理的。对于人脸识别,同样的人但是不同的照片,应该被映射到同一个 latent space,但这很难做到。
作者提出了 RTS(Random Temperature Scaling),将温度与不确定性相关联,通过随机温度缩放来影响模型的不确定性。
上述皆为论文中内容,实际上,如文中 Eqn.4 和 Eqn.5 以及 Fig.2 所示,作者提出了一种新的损失函数(类似softmax),并引入了 Gumbel 分布。详见原文。
无代码,垃圾文章。
15. De-biased Teacher: Rethinking IoU Matching for Semi-supervised Object Detection
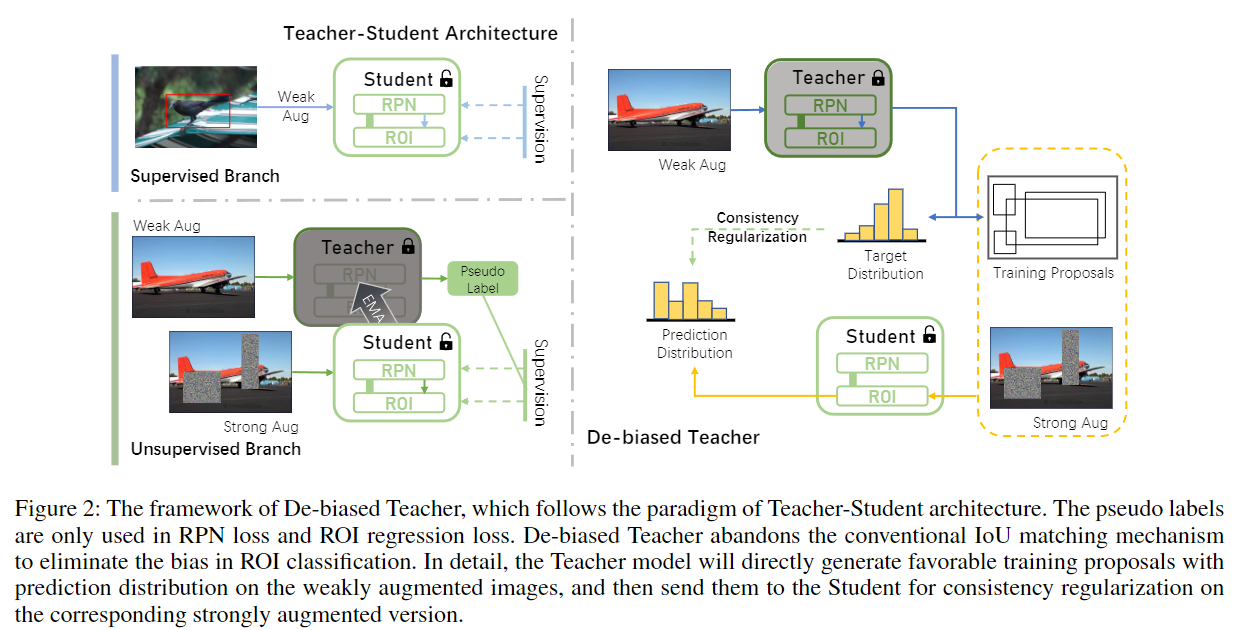
从 $D_{labeled}$ 和 $D_{unlabeled}$ 中采样 input。
- labeled images 直接通过 weakly augmented 来训练 student model。
- unlabeled images,Teacher 通过 weakly augmented 来生成 pseudo labels,之后通过 strong augmented 来训练 student model。作者称之为 一致性正则化。
student model 通过 loss 进行训练更新,teacher model 通过自身和 student model 进行动量更新,详见 Eqn.1。
也就是说,本文三个贡献:
- 一致性正则,和蒸馏的区别在于,teacher 和 student 都动。
- teacher 通过 student 来进行动量更新。
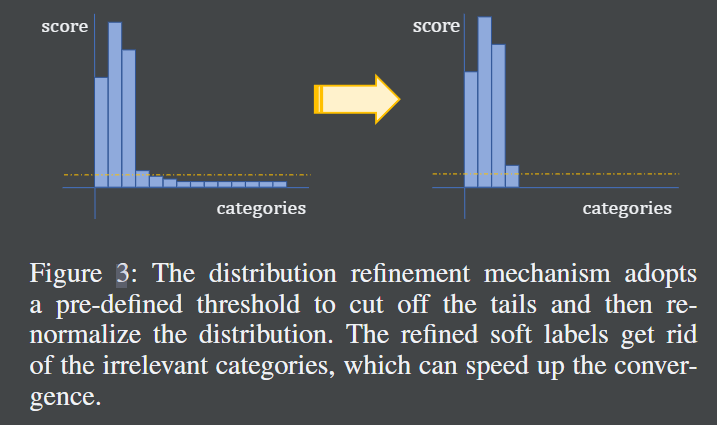
- 截断 softmax 的尾部,阈值为 0.05。(推测没有使用温度系数T)
什么时候阶段?如何阶段?TODO
16. Grouped Knowledge Distillation for Deep Face Recognition
无 code. 已发邮件,未回。
$$L = \mathcal{L}{cls} + \mathcal{L}{kd}$$
其中 $\mathcal{L}_{cls}$ 是一个专门针对于人脸识别的损失函数。
一言以蔽之,作者将 logit 按照阈值进行分组。分别是 Primary-KD, Secondary-KD, and Binary-KD。Primary-KD 用于学习主要的知识,Secondary-KD 用于学习次要的知识,Binary-KD 用于确保教师和学生之间的知识分布的一致性。作者表示,Primary-KD 和 Binary-KD 是重要的,Secondary-KD 是累赘。
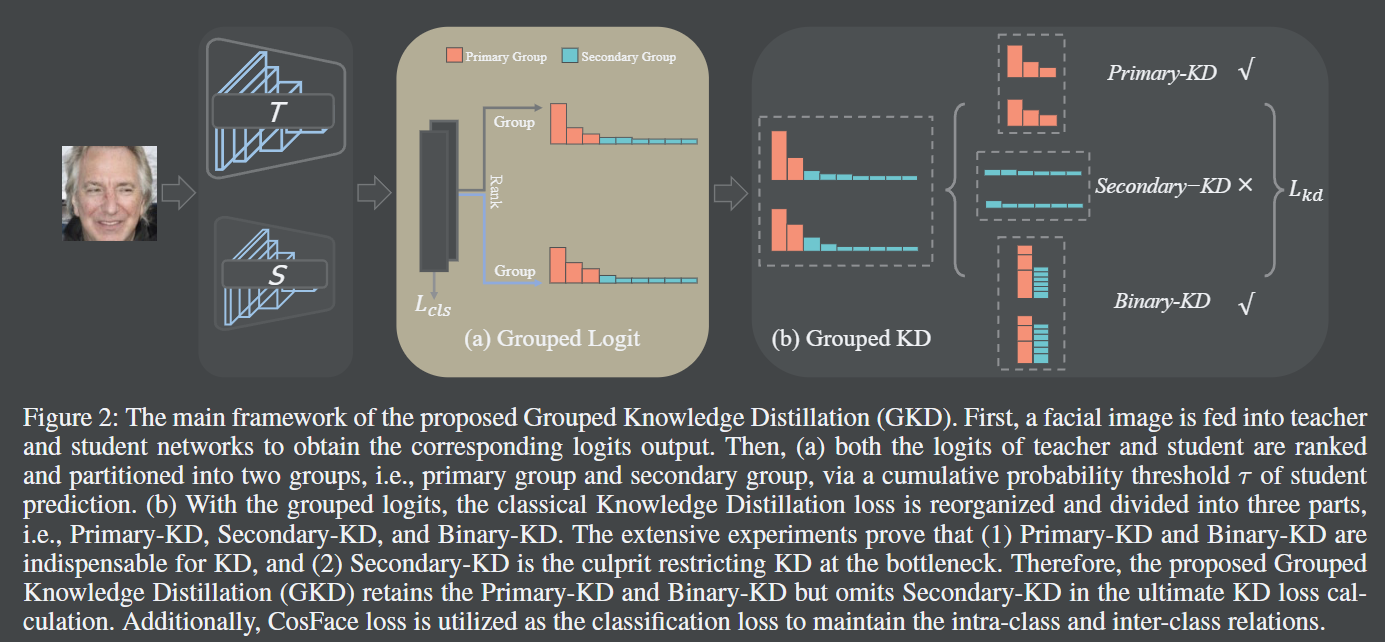
Binary-KD 参见原文公式 6,实际上就是一个二分类问题,用于确定分类是 Primary-KD 还是 Secondary-KD。
注意 Fig.2 中的文字描述,作者指出根据 student 的输出进行 rank,之后开始累加,直到累加的值达到了 阈值,这部分就是 Primary-KD。teacher也排序。此处有两个问题:
- 这样排序,岂不是会出现类别不匹配的问题?
- 根据 student 进行 rank 有什么用?不是应该根据 teacher?
作者还在 Method 文字的上面指出 feature distillation 优于 logit distillation。不敢苟同。
作者测试最好的阈值为 0.93,但作者的理论是错误的,所以也并无太多参考价值。
作者 Equ.3 的绝对值加的很好,值得借鉴,根据 teacher 进行排序的话,应该确实是可行的,可以做到自适应调整 Primary-KD 和 Secondary-KD 的比例,但要想做到类型匹配,需要存原来的索引,这样会造成计算成本的增加。
作者最后做了一个 masked face recognition 的实验,这手操作值得学习。
| 作者已回邮件,rank 时对 index 重新组织,并且代码中是根据 teacher 进行 rank. 但匪夷所思的是,作者说最后通过 student 进行 rank 反而会取得更好的结果。 |
-------------本文结束感谢您的阅读-------------
本文链接: http://corner430.github.io/2023/05/14/paper/
版权声明: 本作品采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 进行许可。转载请注明出处!
